As a way to keep myself in track, I’ll create logs as I’m working on things. That way, I can be more regular with work. Anyways, this week will be getting a GUI.
GUI – getting a screen.
Well, here’s the plan. I’ll have to create the PPU (The GBA’s equivalent of a GPU and the CPU timers), so I can get an output. For that, I need a window.
SDL2 to the rescue. I’ve only used SDL2 in Rust (ref: porcel8).
Seems it was pretty easy to get it integrated after installing the SDL libraries.
find_package(SDL2 REQUIRED CONFIG REQUIRED COMPONENTS SDL2)
// link the library to our executable
target_link_libraries(advpi PRIVATE SDL2::SDL2)
And it builds successfully!
The screen
With some X11 forwarding, and adding some code to create a screen on output, we get an output!
Of course, for those of us using Fedora, which uses Wayland, XWayland needs to be enabled, and then on the , X11 forwarding needs to be enabled.
# Set this in /etc/ssh/sshd_config
X11Forwarding yes
Once that’s enabled, its just ssh-ing into the system, and then seeing a wonderful screen
ssh -X geemax # geemax is my test Pi
And, window!
Short end of a week
That’s it for now, I’m afraid.
In retrospect, working with the PI is a bit annoying and I’d like a totally local setup, and also decide between working on the PPU or the timers, whichever gets me to the boot splash screen faster!
This week was hyper-focused on getting normal, proper code execution.
Code layout
The first thing to get right was the code execution.
I found this wonderful project kvm-arm32-on-arm64 that provided a style for doing this.
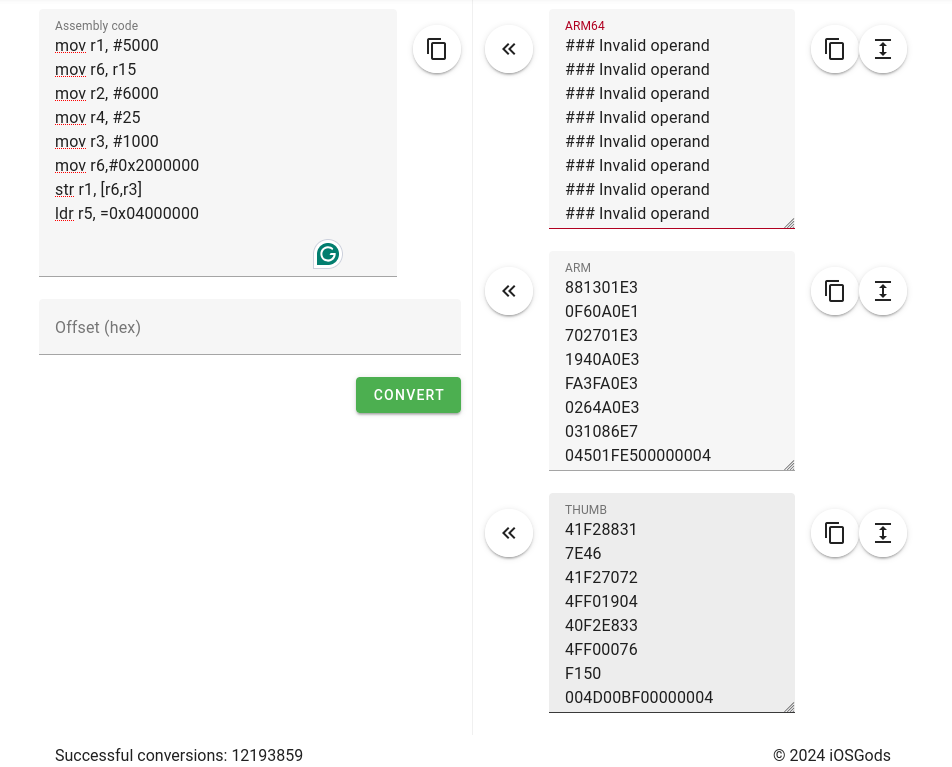
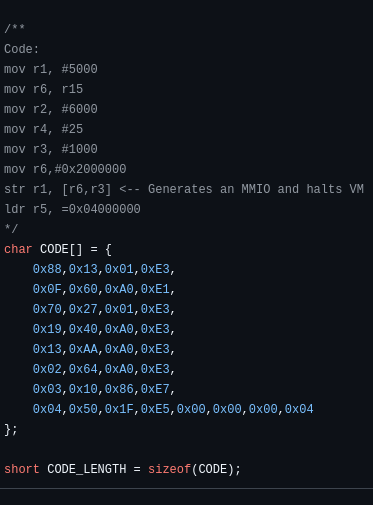
So, it turns out that ARM converter prints the code in the format its in memory. So, to write it correct, I used the big endian format and then stored it in code in the uint32_t format. This way, the compiler will set it to little endian format as required, and I don’t need to think about endianness for a while.
I would expect it to exit from MMIO (as it attempts to write to a read only page) at 0x1000, and exit per the program. If it loops or does anything else, something is wrong.
Thankfully, we get this wonderful(ly confusing) output:
Hello, from advpi!
Opened bios
Attempted mmio
Attempted write=yes of value=4097 and at address=4096
Register(0)=0
Register(1)=0
Register(2)=0
Register(3)=0
Register(4)=0
Register(5)=0
Register(6)=0
Register(7)=0
Register(8)=0
Register(9)=0
Register(10)=0
Register(11)=0
Register(12)=0
Register(13)=0
Register(14)=0
Register(15)=0
Closing the Virtual Machine
So, the MMIO output was correct, but we’re not able to see the registers. I’m thinking it is more related to the exception levels and register banks that are available, but I shall check more on it as required.
So although technically we can’t see the registers, we can get some rudimentary output through MMIO, or shared memory.
If I remove the MMIO causing statement, we get an endless loop – showing that we’re stopping as required.
What’s next
This week was short as well. Following this, I’ll be setting up a GBA cart, and the video device. I’m thinking of using SDL2 to show a video device and handle device I/O.
This week was a non-amusing transfer from C to C++ and adding the GBA BIOS.
BIOS Map
The Nintendo BIOS contains the basic code needed to initalize and use the GBA. After that the BIOS hands over control to the game that’s plugged in. My initial thought was to load the file into the game, then I remembered the golden word which haunted me last week – mmap. It was used to create the memory which is mapped to the guest VM.
So, I mmap-ed the BIOS file into the memory, then added it in.
Now its upto the kernel to manage it, and not my headache (for now).
Then I tried mapping the BIOS into the memory of the VM, and it segfaulted instantly. I changed some of the parameters to allow writes, and then it didn’t segfault, but the mmap didn’t go through.
After looking into the documentation, here’s the mistake I was mapping.
I was setting the slot to 0 for both the onboard memory (or where I was putting my code), and the BIOS page. They are actually different slots of memory, and need to be initialized as separate slots.
C++
I’m not used to C (and KVM and any of this) and it shows, so its probably a good idea to shift to C++ while I still can.
I wanted exceptions to handle unexpected failures, but I also didn’t want to model for releasing resources – a job better left for the compiler. C++ seems to be a better idea. I removed all the GOTOs, and got around to C++, then finally put an exception that helped me with my sanity.
class InitializationError : public std::exception {
private:
std::string message;
public:
InitializationError(std::string);
};
Being able to use exceptions along with constructors is useful. I’m aware that there’s a performance penalty, but it should be fine as long as I spend minimal time processing in my code (the kernel handles running the guest VM, not my code).
What’s next
The registers are still seemingly useful and garbage at the same time, but we shall see. Next week will mostly be travel and continued refactoring while I try to learn more, so next week will be week 5 essentially.
Summarizing what happens above, we “emulate” serial output device, by printing out what the VM wants to be printed, onto the console.
Cool, it works. We’re ready to start porting this onto the RPI.
Wait, how do I work with a RPI PI Zero 2 W?
Device setup
I had just bought this device. So let’s see what we need.
Some way to work with the project.
Running and testing on the RPI.
To run the project, I thought the easiest way would be to cross-compiling. So let’s get cross-compiling setup in Fedora.
And checking on Google, there’s a gcc arm64 cross compiler package:
Well, that’s a no then. Its not possible to cross compile actual userspace executables for ARM64 on x64 machines.
Then, let’s run it on the PI itself.
So, I decided that using some kind of remote development server is good. I tried VSCode, and the poor PI Zero 2 W collapsed given the weight of the remote server.
Well, then zed comes to the rescue. With a bit of tweaking, I connect to the PI over Tailscale, and open it using zed. Perfect.
I’m missing out on debugging, which will make it a pain, but that’s okay. Been through worse. Maybe it’ll finally push me to learn gdb.
Getting to run the Thing
Once that’s in and all things are done, we get to the first bit – compile errors all over the place. Some things are wrong.
Since the KVM API is different, the register names and the structures are different. Now it won’t compile.
KVM_GET_ALL_REGS and the corresponding don’t work. For some reason, its required to use KVM_SET_ONE_REG (and the corresponding individual get register).
Okay, all fixed.
There’s still a few things to fix. Namely, starting the CPU in 32 bit mode, and setting the initial PC and code.
Starting in 32 bit
The Cortex A53 starts in 64 bit as it is… a 64 bit processor. How do I instruct it to start in 32 bit mode? Rummaging through the KVM docs (Ctrl+F for “32-bit”), turns out before starting the CPU, I also need to initialize it with featuresets.
Why is it features[0]? I’m not sure I want to know why its addressed that way after spending way too much time trying to find out. The initialization also gives a bunch of useful features to initialize based on what’s required for us – I don’t want them as of now.
Now that the CPU is ready, something needs to be there to execute code.
Executable code
The days of writing code in assembly is gone (for the regular Software Engineer), but now, we need it again. Regular assemblers are too complex (for me as of now) to generate only the tiny snippets I need. This awesome online tool – “Online ARM to HEX Converter” does it all online. I put a small piece of code and let’s see what it does:
Wonderful – something. So I put this in an array and hope it works.
After all this, it still didn’t work (hint: endianness).
I got an MMIO, but was confused what it meant so I added this hideous snippet:
for (int r = 0; r < 16; r++){
printf("Got Registers: %d(%ld)\n", r,
getRegisterValue(gameboyKvmVM.vcpuFd, r));
}
We get this sad output and the program hangs; and I have no idea what’s going on:
So the registers were loaded correctly – and the code here was executed! But then R15 is 0? and the next LDR also didn’t generate an MMIO. Strange.
What’s next
As the week comes to a close, I’m getting a bit annoyed at managing resources, and would like (at least a bit of) help from the language. I’ve been coding in a “write the code then pray it works” – and have been ignoring cleanup, refactoring and reading the code again. Let’s take the time to do that, fix any issues. Hopefully by then I fix any faults in the program by cleaning up, or atleast learn more by then so I can.